RESEARCH
Undergraduate Researcher/Co-Author
Poly-PEDAL Lab
Aug 2016 - Oct 2017
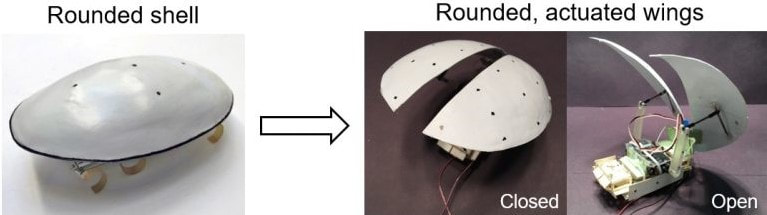
- Publication: IEEE/RSJ International Conference on Intelligent Robots and Systems paper, “Cockroach-inspired robot reveals principles of ground-based dynamic self-righting dynamic self-righting” (Selected as a Highlight Paper, 20 out of 840) PDF
- Terradynamics research on ground-based, dynamic self-righting robots traversingon multi-terrain surfaces
- Arduino/Solidworks/Matlab: Design, prototype, and analyze winged cockroach-inspired robot
- Implemented mirrored retro-reflective markers with OptiTrack for 3D Kinematic motion tracking
Undergraduate Researcher
Ballistics Impact Lab
Feb 2017 - May 2017
- Research efficacy of silicone- based projectiles on torso, to test protective equipment and for replacing “less lethal” rubber bullets used by riot police; systematize ballistics impact data collection
Research Engineer
Dr. Sharon Di Bartolomeo Henessy Robotics Center
● Independently designed, constructed, and tested a DIY Two-Wheel Electric Balancing Chair using raw materials and a recycled electric wheel chair.
● Redesigned a Logitech Joystick by rewiring/soldering for user-friendly control of the robot.
● Demonstrated engineering process: design, build, test, and trouble-shooting.
● Hands-on training: machining, soldering, laser-cutting, 3D printing, fabrication in robotic construction.
● Redesigned a Logitech Joystick by rewiring/soldering for user-friendly control of the robot.
● Demonstrated engineering process: design, build, test, and trouble-shooting.
● Hands-on training: machining, soldering, laser-cutting, 3D printing, fabrication in robotic construction.
